Veel mensen beschouwen een robot als een machine die zelfstandig kan draaien. Echter, als je de definitie van "robot" iets te verbreden, op afstand bedienbare objecten kan worden beschouwd als een robot. Je denkt misschien dat het bouwen van een op afstand bestuurbare robot is stoer, maar in werkelijkheid, het is simpel als je weet hoe. Dit artikel zal uitleggen hoe je een op afstand bestuurbare robot te bouwen.
Stappen
- 1Herkennen wat je zal de bouw van de eerste stap in het bouwen van een op afstand bestuurbare robot is te erkennen dat je niet gaat om te kunnen een full-size, tweebenige, mensachtige robot die al uw klusjes kunnen doen bouwen. Evenmin wordt u het bouwen van een robot met meerdere klauwen die kunnen reiken en pikken £ 100 gewichten. U moet beginnen met het bouwen van een robot die om vooruit te gaan in staat zal zijn, achteruit, links en rechts van u het draadloos besturen. Echter, nadat je de basics beneden en hebben dit eenvoudige robot gebouwd, kun je meestal toevoegen en dingen wijzigen op. Je moet gaan meestal door het principe dat geen enkele robot ooit is voltooid. Het kan altijd worden gemodificeerd en beter.
- 2Plannen van uw robot Voordat de bouw van je robot, nog voor het bestellen van onderdelen. Je nodig hebt om je robot te ontwerpen. Voor uw eerste robot moet je gaan met een eenvoudig ontwerp van slechts twee servomotoren op een vlak stuk plastic. Dit ontwerp is heel eenvoudig en meestal laat extra ruimte om extra dingen toe te voegen nadat het is gebouwd. Van plan om iets over 15 cm te bouwen. 20 cm. Voor een robot dit eenvoudige, moet u in staat om gewoon tekenen op papier met behulp van een liniaal. Tekenen van hetzelfde formaat op papier zoals het moet zijn in het echte leven, omdat de robot is zo klein. Wanneer je in grotere, meer complexe robots, moet je beginnen om te leren hoe u CAD of een programma dat lijkt op het, zoals Google Sketchup gebruiken.
- 3Kies uw onderdelen het is nog niet de tijd om onderdelen te bestellen. Maar je moet ze nu kiezen en weet waar ze te kopen. Probeer te bestellen bij zo weinig mogelijk sites en je kunt soms geld te besparen op verzendkosten. U een materiaal voor de behuizing, twee "servo" motoren, een batterij, een zender, een zender en een ontvanger nodig.
- Het kiezen van een servomotor Om de robot moet je motoren gebruiken bewegen. Een motor wilskracht een wiel en een voor de ander. Op deze manier kunt u gebruik maken van de eenvoudigste besturing methode, differentiële aandrijving. Dit betekent dat om vooruit vooruit gaan beide motoren draaien, om achteruit gaan beide motoren draaien achteruit, en draai een motor gaat en een motor blijft nog steeds. Een servomotor is anders dan een eenvoudige DC motor omdat een servomotor is gericht, kan alleen draaien 180 graden, en kan data terug zenden op zijn positie. Dit project zal worden met behulp van servomotoren omdat het makkelijker en je hoeft niet om een dure "snelheidsregelaar" of een aparte versnellingsbak kopen. Nadat u weten hoe u een op afstand bestuurde robot te bouwen, wilt u misschien een andere (of wijzig de eerste) naar DC-motoren, in plaats van servo motoren gebruiken. Er zijn vier fundamentele dingen die je hoeft te maken over wanneer het kopen van servomotoren. Dit zijn snelheid, koppel, grootte / gewicht, en als ze 360 Modifiable. Sinds servo motoren draaien slechts 180 graden, zou je robot alleen maar om vooruit te gaan een beetje kunnen. Als de motor is 360 graden aanpasbaar, kunt u wijzigen om continu draaien. Zorg ervoor dat de motor is 360 graden aanpasbaar. Grootte / gewicht is niet erg belangrijk in dit project, omdat je waarschijnlijk genoeg ruimte toch overblijft. Proberen iets gemiddelde grootte krijgen. Torque is de motoren kracht. Deze zijn wat de tandwielen worden gebruikt voor. Als er geen versnellingen en het koppel laag is, zal het waarschijnlijk niet toestaan dat de robot om verder te gaan, omdat het niet de kracht hebben. U wilt een hoog koppel, maar hoe hoger het koppel, algemeen hoe lager de snelheid. Voor deze robot, probeer een goede balans tussen snelheid en koppel te krijgen. U kunt altijd aanschaffen en die een krachtiger of sneller servo nadat u klaar gebouw. Het wordt aanbevolen om de HiTec HS-311 servo voor de eerste RC robot te krijgen. Deze servo heeft een goede balans van snelheid en koppel, is goedkoop, en het is een goede maat voor deze robot. De HiTec HS-311 servo kunnen worden gekocht
- Omdat de servo kan normaal gesproken alleen draaien 180 graden moet je om het te wijzigen, zodat het heeft continue rotatie. Wijzigen van een servo maakt de garantie ongeldig, maar het moet gebeuren. Voor gedetailleerde instructies over hoe je een servo go wijzigen
- Kies een batterij U moet iets te krijgen aan de macht uw robot. Probeer niet om AC (dwz stekker in het stopcontact) macht te gebruiken. Je moet gebruik maken van DC (dwz batterijen) macht.
- Kies een Type batterij * Er zijn 3 belangrijke soorten batterijen die we zullen kiezen uit. Dit zijn Lithium Polymer (LiPo), NiMH, NiCad, en Alkaline.
- Lipo accu's zijn de nieuwste batterijen die je kunt krijgen en zijn zeer licht. Ze zijn echter gevaarlijk, duur en vereisen een speciale lader. Gebruik alleen dit type batterij als u ervaring in robots en bereid zijn om meer geld te besteden aan je robot.
- NiCad batterijen zijn gemeenschappelijke oplaadbare batterijen. Deze worden gebruikt in veel robots. Het grootste probleem met deze batterijen is als je ze op als ze niet volledig dood, zullen ze niet duren zo lang op een volledige lading.
- NiMH-batterijen zijn zeer vergelijkbaar met NiCad batterijen in grootte, gewicht en prijs, maar hebben een betere algemene prestaties en dit zijn de batterijen meestal aanbevolen voor een project voor beginners.
- Alkaline batterijen zijn de gemeenschappelijke batterijen die niet oplaadbaar zijn. Deze batterijen zijn vaak (Je hebt waarschijnlijk een aantal), goedkoop en makkelijk te krijgen. Echter, ze sterven snel en je moet ze opnieuw kopen over en weer. Gebruik deze.
- Kies Accuspecificaties Je moet kiezen een voltage van uw batterij. De meest voorkomende in robots zijn 4.8V en 6.0V. De meeste servo's zal goed zijn die op een van deze. Het wordt meestal aanbevolen te gaan met de 6.0V (als uw servo's kan omgaan, die de meeste kan), want het zal u toestaan om uw servo motor sneller en hebben meer macht. Nu moet je om te gaan met de capaciteit van de accu van uw robot. Deze worden aangeduid als MaH. Hoe hoger je gaat, hoe beter, maar de duurdere en meestal zwaarder. Voor de grootte van de robot u bouwt, is het adviseren over 1800 mAh. Als je moet kiezen tussen een 1450 mAh batterij of een 2000 mAh accu van dezelfde spanning en gewicht gaan met de MaH 2000. Het zal duurder worden door een paar dollar, maar is een hele betere batterij te krijgen. Zorg ervoor dat u een lader om uw accu op te laden met te krijgen. Een 6.0V 2000mAh NiMH-batterij kan worden gekocht
- Kies een Type batterij * Er zijn 3 belangrijke soorten batterijen die we zullen kiezen uit. Dit zijn Lithium Polymer (LiPo), NiMH, NiCad, en Alkaline.
- Kies een materiaal voor uw robot Een robot heeft een chassis om alle elektronica te bevestigen. De meeste robots deze grootte zijn gemaakt van kunststof of aluminium. Voor een beginner, is het aanbevolen om een soort plastic genaamd HDPE gebruiken. Deze kunststof is makkelijk om mee te werken en goedkoop. Bij het bepalen van de dikte te krijgen, krijgt ongeveer 1/4 "dik. Bij het bepalen hoe groot van een blad te krijgen, moet je waarschijnlijk krijg je een vrij groot blad in het geval je rotzooi op snijden. Het is meestal aan te raden om minstens de dubbele krijgen grootte van je robot. Echter, u waarschijnlijk moeten krijgen meer. A 1/4 "24" X24 "stuk HDPE kunnen worden gekocht
- Kies een zender / ontvanger Dit gaat om het duurste onderdeel van je robot te zijn. Het kan ook worden beschouwd als de belangrijkste, want zonder dat, de robot kan niets doen. Het wordt sterk aanbevolen een goede zender / ontvanger om te beginnen met te kopen, want het is het ding dat de limiet aan hoeveel je kunt op zal zijn. Een goedkope zender / ontvanger zal je robot prima verplaatsen, maar u zult niet in staat zijn om iets toe te voegen. Ook kan de zender worden gebruikt voor andere robots die kunnen bouwen in de toekomst. Dus in plaats van het kopen van nu en een duurdere later een goedkope, koop gewoon de betere nu. Het zal u geld besparen op de lange termijn. Hoe dan ook, er zijn een paar frequenties die u kunt gebruiken. De meest voorkomende zijn 27Mhz, 72Mhz, 75Mhz en 2.4Ghz. 27Mhz kan worden gebruikt voor vliegtuigen of auto's. Het wordt het meest gebruikt in goedkope afstand bestuurbaar speelgoed. 27Mhz wordt afgeraden voor alles behalve kleine projecten. 72Mhz kan alleen worden gebruikt voor luchtvaartuigen. Omdat 72Mhz wordt normaal gebruikt in grote modelvliegtuigen, is het illegaal om te gebruiken in het oppervlak voertuigen. Als je dat doet gebruik 72Mhz, niet alleen bent u de wet overtreden, maar je kon bemoeien met een grote, dure model vliegtuig vliegt in de buurt. Dit zou kunnen laten crashen en kan een hoop geld kosten om te repareren, of erger nog crash in een persoon en verwonden of zelfs te doden. 75Mhz is gemaakt voor alleen aan de oppervlakte gebruiken, dus je zou dit een te gebruiken. Echter, 2.4Ghz is de beste. Het heeft minder storend dan een van de overige frequenties. Is het sterk aanbevolen om de extra paar dollars en het krijgen van een 2.4Ghz zender en ontvanger. Nadat u besloten welke frequentie je gaat gebruiken, moet u beslissen hoeveel "kanalen" je gaat krijgen op de zender / ontvanger. Kanalen zijn vrij veel hoe veel dingen die je kunt controleren op je robot. Voor deze robot zal u minstens twee nodig. Een kanaal laat je robot vooruit / achteruit te gaan en men zal toelaten om links / rechts gaan. Echter, is het aanbevolen om minstens 3 te krijgen. Dit is omdat, nadat u de robot gebouwd, wil je misschien een ander ding aan toe te voegen. Als je 4, heb je meestal twee joysticks. Met een vier kanaals zender / ontvanger, kunt u in staat om uiteindelijk toe te voegen een klauw. Zoals eerder gezegd, moet je de beste zender / ontvanger uw budget het toelaat nu, dus je hoeft niet naar een beter later te kopen. U kunt uw zender en zelfs uw ontvanger opnieuw te gebruiken op andere robots je kan bouwen. De Spektrum DX5e 5-kanaals 2.4Ghz Radio System Mode 2 en AR500 kunnen samen worden gekocht
- Kies Wielen Bij de keuze van wielen, de drie belangrijkste dingen die je hoeft te maken over zijn diameter, tractie, en als ze gemakkelijk zal hechten aan uw motoren. Diameter is de lengte van het wiel aan een kant door het middelpunt, de andere kant. Hoe groter de diameter van het wiel, hoe sneller gaat en hoe het kan bereiken maar minder koppel zal hebben. Als je een kleiner wiel, kan het niet in staat zijn om te klimmen zeer gemakkelijk of gaan heel snel, maar het zal meer macht te hebben. Tractie is hoe goed de wielen zich aan de oppervlakte. Zorg ervoor dat je wielen met een rubber of schuimrubber ring rondom hen, zodat ze niet alleen schuiven. De meeste wielen die zijn gemaakt om te hechten aan servo's, in staat om gewoon schroef recht op hen zal zijn, zodat u zich geen zorgen te maken over dat zo veel. Het is aangeraden om een wiel ergens tussen 3 en 5 cm in diameter met een rubberen ring om hen te krijgen. U moet 2 wielen. Precisie disk wielen kunnen worden gekocht
- Het kiezen van een servomotor Om de robot moet je motoren gebruiken bewegen. Een motor wilskracht een wiel en een voor de ander. Op deze manier kunt u gebruik maken van de eenvoudigste besturing methode, differentiële aandrijving. Dit betekent dat om vooruit vooruit gaan beide motoren draaien, om achteruit gaan beide motoren draaien achteruit, en draai een motor gaat en een motor blijft nog steeds. Een servomotor is anders dan een eenvoudige DC motor omdat een servomotor is gericht, kan alleen draaien 180 graden, en kan data terug zenden op zijn positie. Dit project zal worden met behulp van servomotoren omdat het makkelijker en je hoeft niet om een dure "snelheidsregelaar" of een aparte versnellingsbak kopen. Nadat u weten hoe u een op afstand bestuurde robot te bouwen, wilt u misschien een andere (of wijzig de eerste) naar DC-motoren, in plaats van servo motoren gebruiken. Er zijn vier fundamentele dingen die je hoeft te maken over wanneer het kopen van servomotoren. Dit zijn snelheid, koppel, grootte / gewicht, en als ze 360 Modifiable. Sinds servo motoren draaien slechts 180 graden, zou je robot alleen maar om vooruit te gaan een beetje kunnen. Als de motor is 360 graden aanpasbaar, kunt u wijzigen om continu draaien. Zorg ervoor dat de motor is 360 graden aanpasbaar. Grootte / gewicht is niet erg belangrijk in dit project, omdat je waarschijnlijk genoeg ruimte toch overblijft. Proberen iets gemiddelde grootte krijgen. Torque is de motoren kracht. Deze zijn wat de tandwielen worden gebruikt voor. Als er geen versnellingen en het koppel laag is, zal het waarschijnlijk niet toestaan dat de robot om verder te gaan, omdat het niet de kracht hebben. U wilt een hoog koppel, maar hoe hoger het koppel, algemeen hoe lager de snelheid. Voor deze robot, probeer een goede balans tussen snelheid en koppel te krijgen. U kunt altijd aanschaffen en die een krachtiger of sneller servo nadat u klaar gebouw. Het wordt aanbevolen om de HiTec HS-311 servo voor de eerste RC robot te krijgen. Deze servo heeft een goede balans van snelheid en koppel, is goedkoop, en het is een goede maat voor deze robot. De HiTec HS-311 servo kunnen worden gekocht
- 4Bestel uw onderdelen nu dat je je onderdelen hebt gekozen, ga je gang en online bestellen. Probeer ze te bestellen bij zo weinig mogelijk sites, omdat je in staat zijn om geld te besparen op de verzendkosten die manier als je alles tegelijk bestellen.
- 5Meet en verkort uw chassis uit een liniaal en een sharpie en meet de lengte en breedte van uw chassis van het materiaal dat u gebruikt voor uw chassis. Ik raadde ongeveer 15 cm met ongeveer 20 cm. Nu, meet het opnieuw en zorg ervoor dat je lijnen zijn niet krom en zijn hoe lang je wilt dat ze zijn. Vergeet niet, meet twee keer, een keer knippen. Nu, kunt u zich snijdt. Als u gebruik maakt van HDPE, moet u in staat om het te snijden op dezelfde manier als je een stuk hout die grootte zou snijden.
- 6Monteer de robot nu dat je al je materiaal en je chassis knippen, je hoeft alleen maar om het allemaal samen te monteren. Dit kan het gemakkelijkste stap eigenlijk als je de robot ontworpen ook.
- Monteer de servo motoren aan de onderkant van het stukje plastic aan de voorkant. Zij moeten zijdelings zodat de as / hoorn (het deel van de servo die beweegt) staan de kanten. Zorg ervoor dat er genoeg ruimte te monteren van de wielen.
- Bevestig de wielen aan de servo met de schroeven die bij de servo kwam.
- Plak een stukje klittenband op de ontvanger en de andere op de accu.
- Leg twee stukken van het tegenovergestelde klittenband op de robot en steek je ontvanger en accu aan.
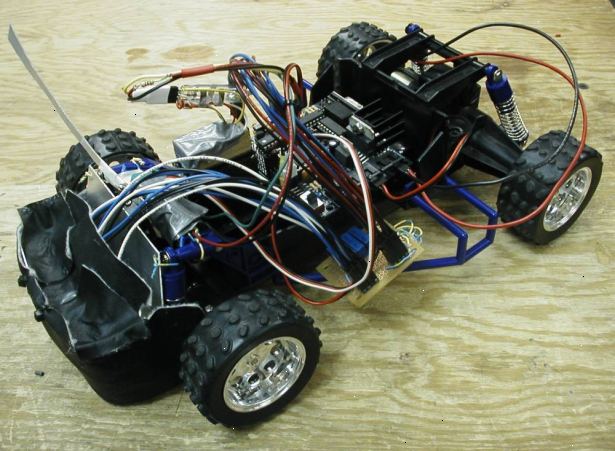
- Je moet nu een robot die twee wielen aan de voorkant heeft en hellingen naar beneden aan de achterkant. Er is niet van plan om een "derde wiel" op deze robot te zijn, in plaats van de rug zal enkel glijden langs de vloer.
- 7Steek de draden in nu dat je de robot gemonteerd, hoeft u alleen maar om alles te sluiten op de ontvanger. Steek de batterij in waar het zegt "batterij" van de ontvanger. Zorg ervoor dat u de stekker op de juiste manier. Nu, sluit de servo's in de eerste twee kanalen op de ontvanger, waar het zegt "kanaal 1" en "kanaal 2".
- 8Laad het op trek de batterij uit de ontvanger en sluit deze aan op de oplader. Wacht totdat de batterij is klaar is met opladen. Dit kan een volle 24 uur duren, dus wees geduldig.
- 9Speel ermee moet je nu al gebeuren. Ga je gang, druk naar voren op de zender. Bouwen van een hindernisbaan voor het, spelen met uw kat. Nu dat je klaar bent met spelen. Voeg wat dingen aan het!.
Tips
- Zorg ervoor dat de zender en ontvanger die u koopt dezelfde frequentie. Ook, zorg ervoor dat de ontvanger heeft dezelfde of meer hoeveelheid kanalen als de zender. Als er meer kanalen op de ontvanger is dan de zender, wordt alleen het laagste aantal kanalen bruikbaar.
- Items toevoegen. Als u een extra kanaal op je zender / ontvanger gehad, kunt u een andere servo motor om iets extra's te doen toevoegen. Als je er een extra kanaal, probeer een klauw die kunnen sluiten maken. Als je twee extra kanalen, probeer een klauw die kan openen / sluiten en naar links en rechts te maken. Gebruik je fantasie.
- Je kan hebben om een adapter waarmee u de batterij in de oplader te kopen.
- Als u met de rechtermuisknop op en de robot gaat verlaten, probeer dan de ingang die u aangesloten de servo's in op de ontvanger. dwz als u de juiste servo aangesloten op kanaal 1 en de linker naar kanaal 2, schakel ze en steek het recht in kanaal 2 en de linker in kanaal 1.
Waarschuwingen
- Beginners moeten niet proberen om wisselstroom (dwz aangesloten op het stopcontact) te gebruiken voor zelfgemaakte project. Netvoeding is uiterst gevaarlijk.
- Weet de frequentie 72Mhz niet gebruiken, tenzij u het bouwen van een vliegtuig. Als u geen gebruik het op een oppervlak voertuig, niet alleen is het illegaal, maar je kon verwonden of zelfs te doden iemand.
Dingen die je nodig hebt
- Materiaal voor uw Chassis: HDPE is ongeveer 15€ 0,00 voor de maat die u zou moeten krijgen, en krijgt u volop extra hebben.
- Twee servomotoren: HiTec HS-311 servo's zijn ongeveer 10€ 0,00 per stuk.
- A-ontvanger: De ontvanger van de zender die is aangebracht aan de binnenzijde van de helikopter
- A Batterij: A 6.0V 2000mAh NiMH-batterij is ongeveer 20€ 0,00.
- Een Battery Charger: Een batterijlader is ongeveer 15€ 0,00.
- 2 Wielen: Precision Disk Wheels 5 cm in diameter zijn ongeveer 10€ 0,00 per stuk.
- Plakkerige Velcro